- Как cделать орнитоптер своими руками
- Видеообзор
- 1. Выбор начальных параметров размаха крыльев, веса и частоты взмахов.
- 2. Выбор Махательного Механизма
- 3. Выбор компонентов. Мотор, ESC и Aккумулятор.
- Выбор мотора
- Источник питания
- Регулятор оборотов (ESC)
- Научный опыт (Птица-робот)
- Смотрите также
- ООО «ЧИП и ДИП»
- Блог
Как cделать орнитоптер своими руками

Эта инструкция — история о том, как я сделал прототип орнитоптера.
Для тех, кто не знает, орнитоптер — это механизм, который летает за счёт взмахов крыльями, как настоящая птица. Идея состояла в том, чтобы создать орнитоптер с нуля, управлять им дистанционно и, конечно, заставить его летать.
Пожалуйста, не судите строго — я не профессионал авиамоделирования. Так что не всё работает так, как мне бы хотелось, но всё же работает.
Реальный результат можно увидеть в многосерийном видео на нашем канале Youtube. Если вам понравится это руководство, пожалуйста, подпишитесь на канал.
Инструкция со временем будет исправляться и улучшаться новыми материалами, как и Орнитоптер.
Видеообзор
1. Выбор начальных параметров размаха крыльев, веса и частоты взмахов.
С какой частотой птицы обычно машут крыльями?
Это зависит от площади крыла самой птицы. Например, для аиста достаточно махать крыльями с частотой 2 взмаха в секунду, воробей должен делать 13 взмахов в секунду, а колибри — до 80. Я хотел сделать большой орнитоптер, поэтому площадь крыла тоже будет большой. Для расчета площади крыла нужно знать размах крыльев. Итак, размах крыльев стал первым выбранным параметром. Я решил сделать орнитоптер с размахом крыльев в диапазоне 1200-1400 мм.
Я искал в интернете существующие конструкции орнитоптеров и анализировал их размеры. Большинство орнитоптеров сделаны в строке определенного размера. Орнитоптеры Hobbie могут быть отсортированы по размаху крыльев (от 660 до 3000 мм) и весу в полете. Мой орнитоптер с размахом крыльев 1200-1400 мм будет где-то посередине этой шкалы, не большой, но и не маленький.
Я искал информацию о конструкции на форумах авиамоделирования, в спецификациях об орнитоптерах и во множестве видео на Youtube. Я выяснил, что орнитоптеры с таким размахом крыльев должны выполнять от 5 до 7 взмахов в секунду и иметь полетный вес в диапазоне от 300 до 500 г. Я выбрал среднее значение веса полета — 400 г. Поскольку у меня нет опыта в создании самолетов и махалетов, я выбрал все значения эмпирически и в основном надеялся на удачу.
Зная приблизительную частоту взмахов (от 5 до 7 Гц), я могу разработать механизм взмахов.
В итоге для орнитоптера мною были выбранны следующие параметры:
2. Выбор Махательного Механизма
Махательный Механизм является наиболее важной частью орнитоптера. Он преобразует электроэнергию от батареи в махательное движение крыльев. Разработать и собрать такой механизм достаточно сложная задача,так как он должен выдерживать огромные усилия, которые меняют направление несколько раз в секунду, и в то же время быть чрезвычайно легким и долговечным.
Существует большое количество махательных механизмов. Вот самые используемые.

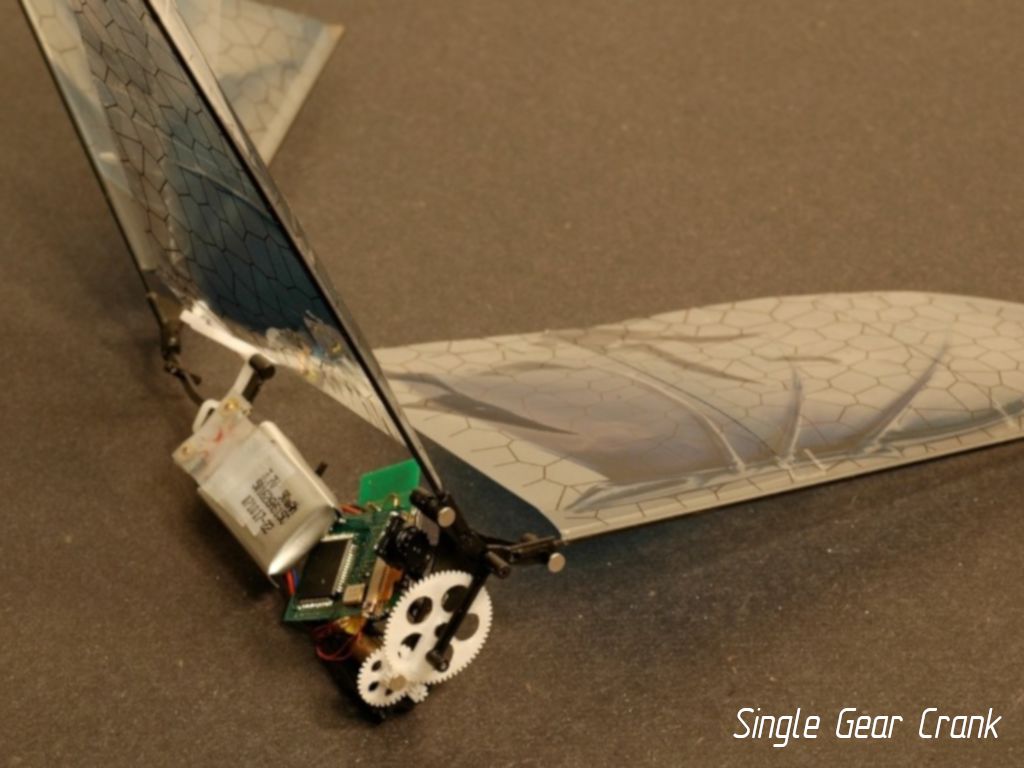
Конструкция кривошипа является самой базовой среди махательных механизмов. Части ступенчатого вала находятся на необходимиом растоянии и под необходимым углом для достижения симметричного взмаха. Это часто используемая конструкция среди любителей, которые собирают орнитоптеров из подручных материалаов.

Кривошип с одной передачей (Single Gear Crank)
Несмотря на то что конструкция кривошипа с одной передачей выглядит простой, она сложнее, чем кажется. Центральная точка, где соединительный стержень и шарниры крыльев соединены друг с другом, должна расширяться и сжиматься при закрывании механизма. Сжатие и расширение с очень высокой частотой может привести к износу компонента.
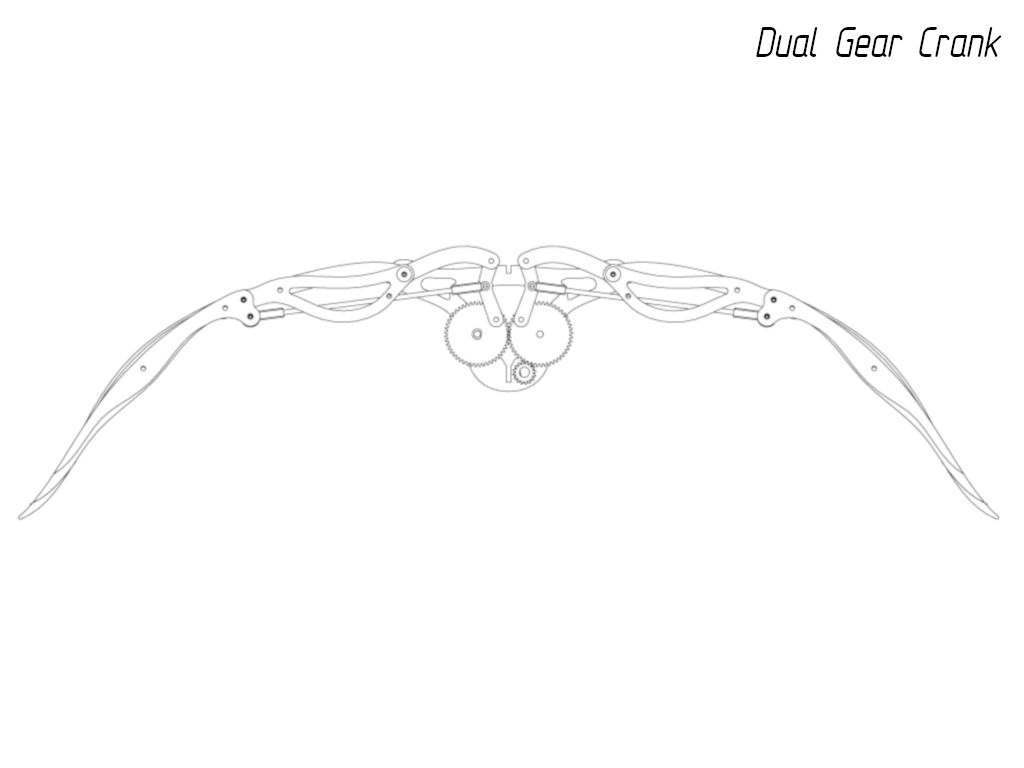
Кривошип с дмумя передачами (Dual Gear Crank)
Эта конструкция имеет две шестерни, которые управляют петлями каждого крыла по отдельности. Существует несколько вариантов конструкции трансмиссии. Шестерня может приводить в движение обе вспомогательные передачи. Таким образом, вторичные шестерни будут вращаться в одном направлении друг с другом. В другой конструкции ведущая шестерня вращает вторичную шестерню, а эта вторичная шестерня вращает другую вторичную шестерню. Вторичные передачи будут вращаться против часовой стрелки друг к другу. Эта конструкция намного проще в реализации и уменьшает несоосность крыла.


Поперечный вал (Transverse Shaft)
Поперечная конструкция вала является еще одним вариантом кривошипно-шатунного механизма. Эта конструкция обеспечивает максимально симметричный взмах. Однако это самый тяжелый и сложный дизайн. Вращающиеся зубчатые колеса и крылья находятся не в одной плоскости, поэтому соединительный стержень должен вращаться. Стержень соединителя имеет шариковый подшипник внутри, и это добавляет вес только к самому компоненту. Количество зубчатых колес, используемых в этой конструкции, больше, чем в любой другой конструкции. Конструкция поперечного вала обычно используется для больших орнитоптеров, где вес можно преодолеть с помощью больших крыльев.

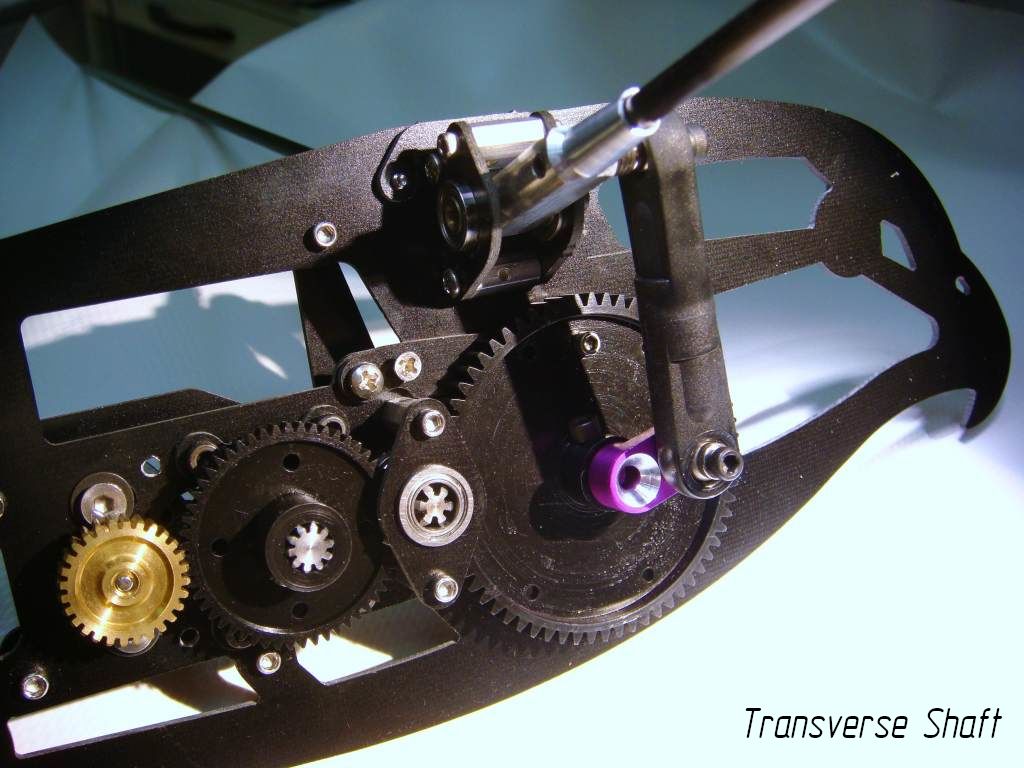
Я решил выбрать конструкцию с поперечным валом. Размер моего орнитоптера позволяет использовать дополнительную массу механизма. Кроме того, такую конструкцию легко изготовить из листового материала, так как плоскости зубчатых колес параллельны плоскости корпуса.
3. Выбор компонентов. Мотор, ESC и Aккумулятор.
Выбор мотора
Мотор должен быть небольшого размера. Моторы большого размера имеют большой вес, что очень критично для конструкции. В то же время электродвигатель должен быть прочным, чтобы обеспечить достаточный крутящий момент для преодоления сопротивления воздуха.
Для увеличения крутящего момента и достижения необходимой частоты взмахов я собираюсь использовать редуктор. В этом случае я могу взять более слабый двигатель с более высоким числом оборотов в минуту (об / мин).
Принимая во внимание размеры орнитоптера, хобби электромоторы размером 300 — 400 должны идеально подходить. Хобби-моторы такого размера могут быть коллекторными или бесколлекторными. В основном вы можете найти их в средних RC катерах и вертолетах.
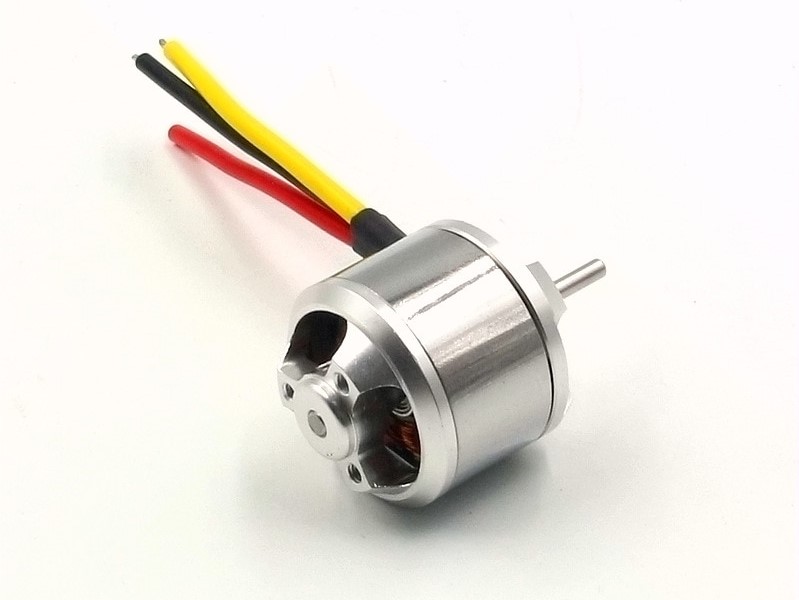

Обратите внимание на важную деталь. Вам нужен аутраннер. Монтажные отверстия двигателя должны быть на одной стороне с выходным валом. Таким образом, корпус, который находится рядом с выходным валом, должен быть неподвижным.
Основные характеристики двигателя:
Краткое объяснение названия:
Первые, 4 цифры в описании (2627) — это размеры двигателя. Первая пара цифр показывает диаметр двигателя (26 мм), а вторая пара показывает длину (27 мм). Значение «кВ» относится к постоянной скорости двигателя. Он измеряется числом оборотов в минуту (об / мин), которое совершает двигатель, когда на него подается 1 В (один вольт) без нагрузки. Например: Этот 2627 4200 кВ бесколлекторник может быть запитан батареей 2S (7.4В) или 3S (11.1В). При значении 4200 кВ и без нагрузки этот двигатель имеет следующие скорости:
Источник питания
В моем орнитоптере батарея — это один из самых тяжелых компонентов, поэтому очень важно выбрать правильную.
Для питания двигателя я использую Li-Po аккумулятор. Коэффициент отношения емкости к массе у таких аккумуляторов достаточно высок. Кроме того, они способны выдавать высокое значение тока, которое требуется для бесколлекторных двигателей.
Существует заметная разница в весе между 2-х и 3-х ячеечными батареями одинаковой емкости. Поэтому я думаю, что лучше использовать 2-ячеечную батарею.
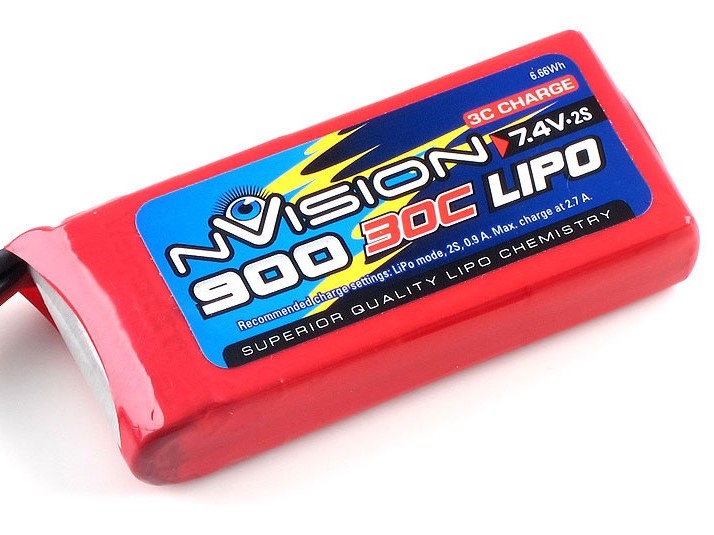
Основные характеристики батареи:
Довайте проверим, достаточно ли максимального тока батареи.
Умножив скорость разряда на емкость, можно рассчитать максимальное значение тока, которое может выдавать аккумулятор:
Максимальный ток 27 А превышает значение, которое может потреблять двигатель (22 А), поэтому все в порядке. Так же очень важана емкость аккумулятора. Этот параметр влияет на продолжительность полета орнитоптера.
Однако, в моем случае, гораздо важнее выбирать батарею в зависимости от веса.
Регулятор оборотов (ESC)
Для управления и регулирования скорости бесколлекторного мотора нужен контроллер. Любой хобби ESC подходит для этого. Единственное, что нужно проверить — это длительный и пиковый ток. Чтобы уменьшить вес орнитоптера, лучше выбрать контроллер в мини-форме.
Вот тот, который использую я:

Так же подойтут вот такие:
Источник
Научный опыт (Птица-робот)
Если вы хотите создать своими руками робота, пусть даже и небольшого, то игрушка «Птица-робот» — как раз для вас. Целью данного эксперимента является сборка робота-птицы. При правильной сборке птица-робот будет двигать крыльями. Ребёнок сможет освоить основы конструирования, механики и электродинамики .
Смотрите также




ООО «ЧИП и ДИП»
Республика Беларусь , 220004, г. Минск, ул. Димитрова, дом 5, торговое помещение №10, офис 41
Свидетельство о регистрации №192781371 выдано 28.02.2017 года Минским городским исполнительным комитетом
УНП 192781371
Регистрация в Торговом реестре Интернет-магазина сhipdip.by №431036 от 05.11.2018
Способы оплаты: банковский перевод, карты Visa, MasterCard, Белкарт, наличными при самовывозе
Телефон: +375 17 311-07-17
Электронная почта: sales@chipdip.by
Время работы пункта выдачи заказов: Пн-Пт 10:00–18:00
Время работы торгового зала: Пн-Пт 9:00–20:00, Сб-Вс 10:00–18:00
Доставка осуществляется: Пн–Пт 10:00–20:00
Источник
Блог

Вам нравится конструкции, имитирующие полеты птиц? Если да, то на этой летающей модели вы не найдете пропеллеров, т.к. эта конструкция создана по образу и подобию полета птицы!
Бионическая птица приводится в действие двигателем BLDC и двумя сервоприводами. Программное обеспечение, управляющее полетом, было подготовлено в программе XOD, графической среде для Arduino.
Представляем проект на Ардуино бионическая птица, которая летает благодаря быстрому взмаху крыльев. Именно эта особенность отличает данную конструкцию от работы популярных квадрокоптеров и самолетов с дистанционным управлением. Автор этого проекта под псевдонимом gabbapeople был вдохновлен другими проектами этого типа, которые он нашел в Интернете.
Проанализировав подобные конструкции, автор описываемого проекта определил, что размах крыльев его птицы-робота должен быть в пределах от 1200 до 1400 мм, и птице придется махать ими 5-7 раз в секунду. Кроме того, вся конструкция должна весить около 400 г.
 |  |
| Различные варианты механизмов, приводящих в движение крылья | Выбранный способ движения крыльев |
Проект работает от двигателя BLDC и двух сервоприводов, благодаря которым можно менять направление полета бионической птицы. Вращательное движение главного приводного двигателя преобразуется в взмах крыльев с помощью частично напечатанной на 3D-принтере шестерни. Остальные элементы каркаса были вырезаны лазером.
Каркас крыла был сделан из стержней, выполненных из углеродного волокна, а для его обшивки использовалась водонепроницаемая нейлоновая ткань. Устройство управляется Arduino, которое было запрограммировано в программе XOD. Удаленное управление бионической птицей возможно благодаря модулю Mbee 868 версии 2.0.
 |  |
| Фрагмент обшивки крыла | Программа управления в XOD |
Процесс создания бионической птицы подробно показан в видео ниже:
Если вы заинтересованы в создании такого проекта, то всю необходимую информацию вы найдете в статье , опубликованной автором этого проекта. Он предоставил очень подробную инструкцию, которая охватывает практически все этапы сборки этой оригинальной птицы!
Источник