5.Бионика в технике
Предметом бионики являются исследования структуры и функционирования биологических объектов различной сложности – от клеток до живых организмов и их популяции с целью создания новых более совершенных технических устройств и синтеза биотехнических комплексов, оптимально использующих свойство биологических и технических элементов, объединяющих в единую функциональную систему целенаправленного поведения.
Давно известно, что птицы, рыбы, насекомые очень чутко и безошибочно реагируют на изменения погоды. Низкий полет ласточек предвещает грозу. По скоплению медуз у берега рыбаки узнают, что можно отправляться на промысел, море будет спокойным. Животные от природы наделены уникальными сверхчувствительными «приборами». Задача бионики не только найти эти механизмы, но и понять их действие и воссоздать его в электронных схемах, приборах, конструкциях.
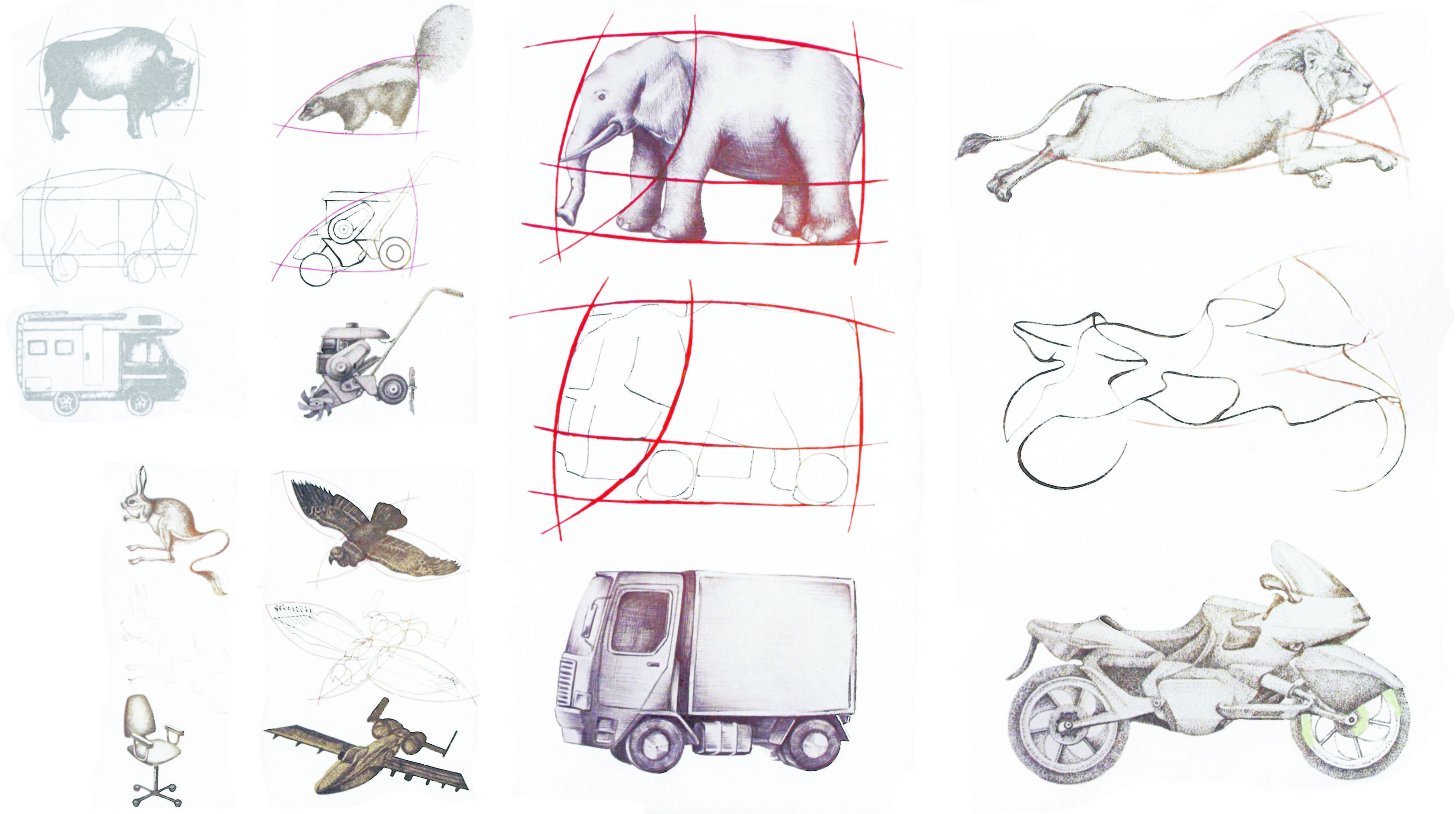
Рисунок 1 – Примерные клаузуры бионических форм техники
Изучение сложной навигационной системы рыб и птиц, преодолевающих тысячи километров во время миграций и безошибочно возвращающихся к своим местам для нереста, зимовки, выведения птенцов, способствует разработке высокочувствительных систем слежения, наведения и распознавания объектов.
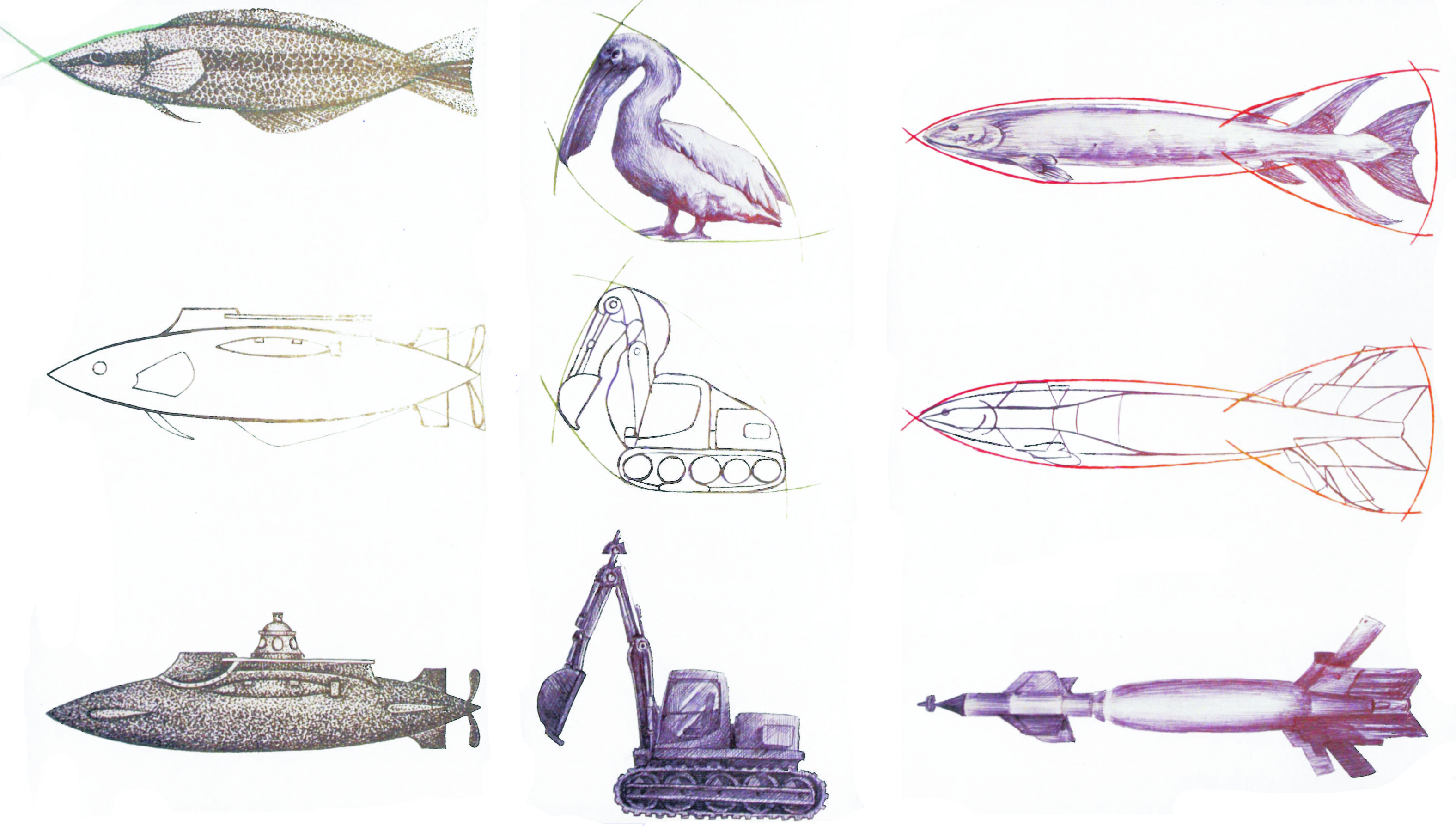
Рисунок 2 – Примерные клаузуры бионических форм техники
В настоящее время большим вкладом в ход научно-технического прогресса являются исследования анализаторных систем животных и человека. Эти системы столь сложны и чувствительны, что пока еще не имеют себе равных среди технических устройств. Например, термочувствительный орган гремучей змеи различает изменения температуры в 0,0010 C; электрический орган рыб (скатов, электрических угрей) воспринимает потенциалы в 0,01 микровольта, глаза многих ночных животных реагируют на единичные кванты света, рыбы чувствуют изменение концентрации вещества в воде 1 мг/м3 (=1мкг/л).
Многие живые организмы имеют такие анализаторные системы, которых нет у человека. Например, у кузнечиков на 12-м членике усиков есть бугорок, воспринимающий инфракрасное излучение. У акул и скатов есть каналы на голове и в передней части туловища, воспринимающие изменения температуры в 0,10 С. Устройство, воспринимающее радиоактивное излучение, имеют улитки, муравьи и термиты. Многие реагируют на изменения магнитного поля (в основном птицы и насекомые, совершающие дальние миграции). Есть те, кто воспринимает инфра — и ультразвуковые колебания: совы, летучие мыши, дельфины, киты, большинство насекомых и т. д. Глаза пчелы реагируют на ультрафиолетовый свет, таракана — на инфракрасный и т. д.
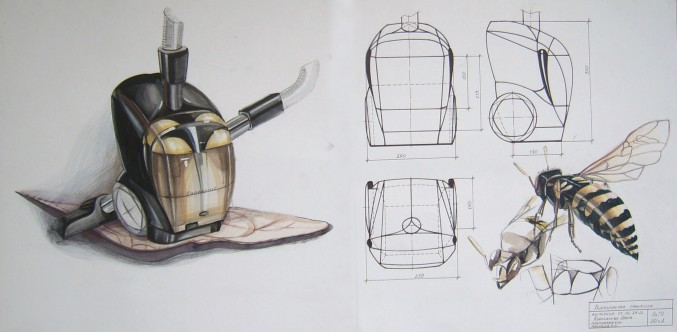
Рисунок 3 – Примерные клаузуры бионических форм техники
Есть еще многие системы ориентации в пространстве, устройство которых пока не изучено: пчелы и осы хорошо ориентируются по солнцу, самцы бабочек (например, ночной павлиний глаз, бражник мертвая голова и т. д.) отыскивают самку на расстоянии 10 км. Морские черепахи и многие рыбы (угри, осетры, лососи) уплывают на несколько тысяч километров от родных берегов и безошибочно возвращаются для кладки яиц и нереста к тому же самому месту, откуда сами начали свой жизненный путь. Предполагается, что у них есть две системы ориентации — дальняя, по звездам и солнцу, и ближняя — по запаху (химизм прибрежных вод).
Изучение гидродинамических особенностей строения китов и дельфинов помогло создать особую обшивку подводной части кораблей, которая обеспечивает повышение скорости на 20–25% при той же мощности двигателя. Называется эта обшивка ламинфло и, аналогично коже дельфина, не смачивается и имеет эластично-упругую структуру, что устраняет турбулентные завихрения и обеспечивает скольжение с минимальным сопротивлением. Такой же пример можно привести из истории авиации.
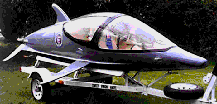


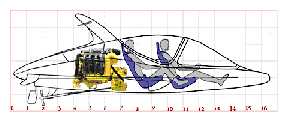
Рисунок 4 – Испытательный образец плавательного аппарата.
Долгое время проблемой скоростной авиации был флаттер — внезапно и бурно возникающие на определенной скорости вибрации крыльев. Из-за этих вибраций самолет разваливался в воздухе за несколько секунд. После многочисленных аварий конструкторы нашли выход — крылья стали делать с утолщением на конце. Через некоторое время аналогичные утолщения были обнаружены на концах крыльев стрекозы. В биологии эти утолщения называются птеростигмы. Новые принципы полета, бесколесного движения, построения подшипников и т. д. разрабатываются на основе изучения полета птиц и насекомых, движения прыгающих животных, строения суставов.
На симпозиуме по использованию знаний о живых организмах для усовершенствования технических систем было предложено название для вновь созданной биологической науки как бионика. Тогда же был провозглашен лозунг: живые прототипы – ключ к новой технике.
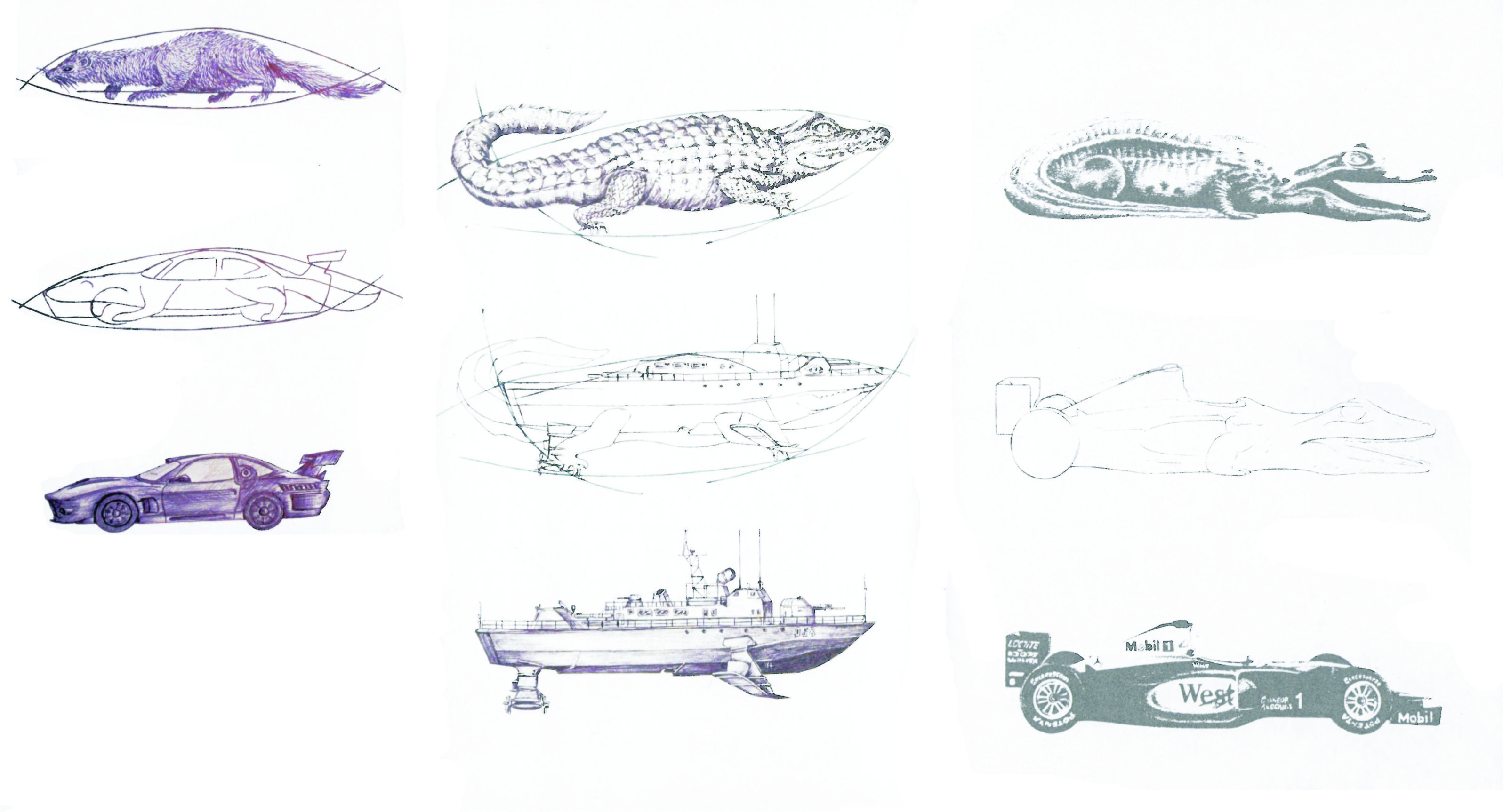
Рисунок 5 – Примерные клаузуры бионических форм техники
Большой интерес к бионике обусловлен значительной практической направленностью этой науки, изучающей принципы построения и функционирования биологических систем прежде всего с целью создания новых машин, приборов, механизмов, строительных конструкций и технологических процессов, характеристики которых были бы столь же совершенными и высокоэффективными, как в живых системах. Несомненно, что в век научно-технической революции эти бионические исследования имеют большое значение для решения сложных инженерных проблем.
На этапе работы вступает в действие инженерное проектирование. Для его осуществления, безусловно, требуется точное описание структур и функций организма, химических реакций, физических особенностей организмов или частей тела, выраженных языком математических формул. Вместе с тем, создавая технические модели, инженер далеко не всегда просто копирует природу – часто это нецелесообразно (так как не исключается улучшение ряда характеристик при техническом моделировании), а иногда и невозможно.
Дело в том, что целостность организма значительно ограничивает разнообразие его структур. В организме не может быть никаких органов, вращающихся на оси по типу колеса, турбины, винта и т. д. Агрегатность технических систем, наоборот, позволяет широко использовать вращающиеся детали. Использование таких агрегатных устройств может значительно облегчить проблему бионического моделирования. Вместе с тем подвижные или имеющие движущиеся части технические устройства неизбежно коренным образом отличаются от животных прототипов тем, что в них не используются двигатели типа сокращающихся волокон. Пока не создана искусственная мышца, существует препятствие точному копированию многих биологических моделей. Таким образом, в технической бионике, т. е. на третьем этапе работы, чаще создаются изоморфные (подобные) конструкции, а не точные копии.

Рисунок 6 — заимствование бионических форм и функций в технике
Однако еще на заре своего развития генеральное направление техники пошло по особому пути. Было создано колесо, видимо как усовершенствование катка, роль которого выполняло бревно. Стала использоваться энергия ветра в водном транспорте, мельницах, шест в качестве способа передвижения судна на воде. Все это не имело аналогий в животном мире. Наряду с этим некоторые технические идеи черпались из окружающей природы. Арабские врачи в начале нашей эры, изучив строение хрусталика, подсказали идею линзы увеличительного стекла. Леонардо де Винчи 400 лет назад разработал конструкцию махолета, приводимого в движение мускульной силой человека. Крылья этого летательного аппарата представляли собой модель крыльев летучей мыши. Многие изобретения прошлого столетия моделировали органы или приспособительные свойства разных животных. Так можно назвать «стопоходящую машину» Чебышева, «шагающую» машину Орловского и Гусева. Немецкий изобретатель Лилиенталь построил один из первых планеров в виде модели парящей птицы. В 30-х годах текущего столетия инженер Игнатьев создал самозатачивающийся резец – модель резцов грызунов, которые никогда не тупятся.
Работая над проектом, дизайнер тщательно проводит сравнительный анализ «живой» и искусственной техники, сопоставляет технические характеристики живых объектов и созданной руками человека аппаратуры и потом делает заключение о целесообразности применения в графике тех или иных изобразительных форм.
Вскрывая и описывая условия, необходимые для осуществления того или иного механического движения, механика является важной теоретической основой техники, в особенности техники построения разнообразных механизмов.
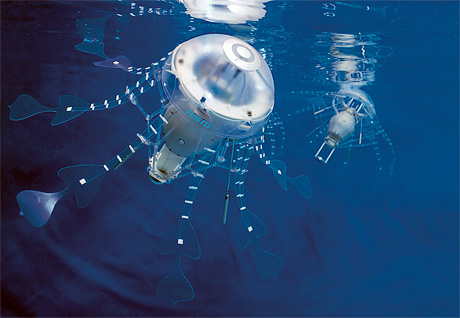
Рисунок 7 – Технический образец выполненный с использованием бионических форм и функций.
Многие характеристики опорно-двигательного аппарата используются при проектировании других технических систем, что является предметом бионики. Так, данные о структуре и механизмах управления «живыми кинематическими цепями» со многими степенями свободы (например, рука, начиная от ключично-лопаточного сочленения, имеет 33 степени свободы, что обеспечивает возможность чрезвычайно разнообразных движений и поворотов) применяются при создании автоматов-манипуляторов и роботов, используемых в различных областях техники.
Работа на стыке наук и особенно Живые системы значительно многообразнее и сложнее технических конструкций. Биологические формы часто не могут быть рассчитаны из-за их необычайной сложности. Мы просто еще не знаем законов их формирования. Тайны структурообразования живых организмов, подробности происходящих в них жизненных процессов, устройство и принципы функционирования можно узнать лишь с помощью самой современной аппаратуры, что не всегда доступно. Но даже при наличии новейшей техники очень многое остается «за кадром». Бионика наступает. Быстрее, выше, сильнее! [14]
Источник