Рекомендации к составлению эквивалентных схем.
При составлении эквивалентных схем следует избегать последовательного соединения источника типа I и ветви типа L, а также параллельного соединения источника типа E и ветви типа С. Причина этого в том, что, например, при последовательном соединении источника силы с элементом гибкости (пружиной) скачкообразное изменение силы приведет к тому, что в узле их соединения скорость может достигать бесконечных величин. При параллельном соединении, например источника давления и гидравлической емкости, влияние емкости никак не сказывается на процессах в объекте, поскольку разность давлений в узлах их подключения определяется только источником и значение расхода, поступающего в емкость при скачкообразном изменении давления, может достигать бесконечных значений. Для устранения таких подключений следует учесть какой-либо эффект, которым ранее пренебрегали: в узел соединения ветвей типа I и L подключить ветвь типа С или R, между ветвями типа Е и С включить ветвь типа R или L. Например, при последовательном соединении источника силы и пружины можно в узел их соединения подключить элемент массы, соответствующий массе пружины, при параллельном соединении источника давления и гидравлической емкости между ними можно включить элемент местного сопротивления, соответствующий сопротивлению входного отверстия в емкости.
Примечание. Приведенные выше замечания в основном относятся к подключению входных источников, но и для зависимых источников их учет также желателен.
Типы связей между подсистемами различной физической природы.
Ранее были рассмотрены эквивалентные схемы однородных физических подсистем. Но реальный объект представляет собой совокупность разнородных физических подсистем. Согласно основным этапам получения ММС на макроуровне, после составления эквивалентных схем однородных подсистем следует установить связи между ними, т. е. определить их воздействие друг на друга.
Можно выделить три типа связей:
При трансформаторном типе связи в одной подсистеме включается зависимый источник разности потенциалов. Этот источник зависит от разности потенциалов на зависимом источнике потока, установленном в другой подсистеме, который, в свою очередь, зависит от потока через первый источник. На рис. 10, а показана эквивалентная схема трансформаторной связи, где р и q — подсистемы различной природы.

Рис. 10. Схема трансформаторного типа связи.
Если же источники в подсистемах поменять местами, то схема будет иметь такой вид, как изображено на рис. 10, б. Подобный вид связи уже встречался в ранее рассмотренных примерах эквивалентных схем однородных физических подсистем (рычаг, зубчатое зацепление колес).
Для разнородных физических подсистем рассмотренная выше связь характерна при электромеханическом взаимодействии.
Пример трансформаторного типа связи.
На рис. 11, а представлен электромеханический вибратор, на рис. 11, б — его эквивалентная схема.

Рис. 11. Пример электромеханического вибратора (а) и его эквивалентная схема (б).
Источник силы F, воздействующий на массу т, зависит от скорости изменения электромагнитного поля, т. е. от тока через катушку электромагнита, или, что то же самое, от тока через источник противо-э.д.с. Е2, который зависит от скорости движения массы т, Е1 — входное синусоидальное напряжение; R — активное сопротивление обмотки электромагнита.
Использование схемы рис. 10, а или 10, б определяются из физических соображений или же из учета последовательного и параллельного подключения источников.
При гираторном типе связи в обеих физических подсистемах включаются зависимые источники одного вида: либо типа разности потенциалов, либо типа тока. Источники разности потенциалов зависят от потока через источник в другой подсистеме (рис. 12, а), источники потока зависят от разности потенциалов на источнике в другой подсистеме (рис. 12, б). Такой вид связи характерен при взаимодействии механической и гидравлической или пневматической подсистем.

Рис. 12. Схема гираторного типа связи.
Пример гираторного типа связи.
На рис. 13, а изображен гидроцилиндр (совокупность гидравлической и пневматической подсистем), а на рис. 13, б — его эквивалентная схема.


Рис. 13. Схематичное изображение гидроцилиндра (а) и его эквивалентная схема (б).
Гидравлическая система на эквивалентной схеме представлена источником давления Р, который через трубопровод (элементы R1 и L1) нагнетает жидкость в переменную емкость C1, механическая подсистема представлена источником усилия F2, который, преодолевая трение штока о стенки, через упругий шток UP1 передвигает поршень массой m1, имеющий трение R2 о стенки цилиндра.
Воздействие на гидравлическую подсистему со стороны механической учитывается источником расхода G, который зависит от скорости движения поршня, т. е.  при
при , где S — площадь поперечного сечения поршня;
, где S — площадь поперечного сечения поршня; — плотность жидкости;V — скорость движения поршня (потенциал механической подсистемы).
— плотность жидкости;V — скорость движения поршня (потенциал механической подсистемы).
Источник силы F1 учитывает воздействие гидравлической подсистемы на механическую:  при
при , гдеР — давление в емкости C1 (потенциал гидравлической подсистемы).
, гдеР — давление в емкости C1 (потенциал гидравлической подсистемы).
Выбор схемы связи (рис. 12, а или 12, б) выполняют так же, как и для трансформаторной связи.
Примечание. Трансформаторная и гираторная связи устанавливают взаимодействие подсистемы по двум парам фазовых переменных. В последнем примере неверной будет такая связь: в гидравлической подсистеме зависимый источник расхода , а в механической — зависимый источник скорости
, а в механической — зависимый источник скорости . В этом случае было бы установлено соответствие только между фазовыми переменными одной пары.
. В этом случае было бы установлено соответствие только между фазовыми переменными одной пары.
3) через зависимые параметры элементов.
Связь через зависимые параметры элементов характерна при взаимодействии с тепловой подсистемой. В зависимости от значений температуры меняются параметры элементов взаимодействующей подсистемы, например вязкость жидкости, значение сопротивления резистора. Обратное влияние на тепловую подсистему учитывается введением в эквивалентную схему тепловой подсистемы зависимых источников теплового потока. При отсутствии массопереноса значение источника определяется мощностью, выделяемой элементом; при наличии массопереноса — переносимой массой.
В случае моделирования влияния температуры на работу технических объектов без учета обратного воздействия предполагают, как будет изменяться температура во времени, и переносят эту зависимость на параметры элементов объекта, т. е. делают параметры зависимыми от времени. Аналогично моделируют старение элементов объекта при расчетах надежности.
Источник
§ 2.2.3. Описание связи между подсистемами разной природы
- Трансформаторная связь
- Гираторная связь
В большинстве случаев ТОУ представляю собой сочетание элементов различной физической природы. Описание связей между ними осуществляется через взаимодействие источников этих подсистем. Различают три типа связей: трансформаторная, гираторная и через зависимые параметры элементов. Трансформаторная связь— связь между источниками разного типа и фазовых переменных одинаковой природы. В одной подсистемеp, выделяется зависимый источник потенциала —Е. Потенциал этого источника, зависит от потенциала, который создается на зависимом источнике потокаІ, выделяемом в другой подсистемеq.. Трансформаторная связь бывает двух видов (рис. 2.5;2.6) 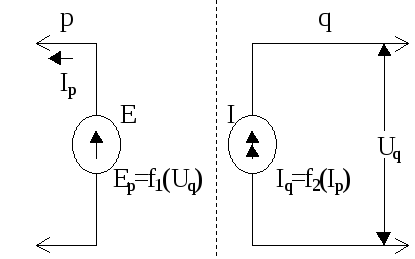 Рис. 2.5. Iвид трансформаторной связи.
Рис. 2.5. Iвид трансформаторной связи.  Рис. 2.6. ІІ вид трансформаторной связи. Такой тип связи характерен для электромеханических систем (реле). Г
Рис. 2.6. ІІ вид трансформаторной связи. Такой тип связи характерен для электромеханических систем (реле). Г ираторная связь– это связь между источниками одного типа и фазовых переменных разной природы (рис. 2.7;2.8) . Рис. 2.7. Iвид гираторной связи.
ираторная связь– это связь между источниками одного типа и фазовых переменных разной природы (рис. 2.7;2.8) . Рис. 2.7. Iвид гираторной связи.  Рис. 2.8. ІІ вид гираторной связи. Взаимодействие источников происходит таким образом: изменение фазовых сменных в одном из источников влияет на смену фазовых сменных в другой подсистеме, и через это связанные источники в разных системах. Такой тип связи характерен для гидромеханических систем (поршневой насос). Связь через зависимые параметрыэлементов присуща для взаимодействия различных подсистем с тепловой системой, так как изменение температуры, как правило, приводит к изменению параметров компонентов. Так сопротивление резистора зависит от температуры. Вопросыдля самоконтроля и подготовки к МК:
Рис. 2.8. ІІ вид гираторной связи. Взаимодействие источников происходит таким образом: изменение фазовых сменных в одном из источников влияет на смену фазовых сменных в другой подсистеме, и через это связанные источники в разных системах. Такой тип связи характерен для гидромеханических систем (поршневой насос). Связь через зависимые параметрыэлементов присуща для взаимодействия различных подсистем с тепловой системой, так как изменение температуры, как правило, приводит к изменению параметров компонентов. Так сопротивление резистора зависит от температуры. Вопросыдля самоконтроля и подготовки к МК:
- Чем трансформаторная связь отличается от гираторной?
Тема 2.3. Представление математических моделей на макро уровне
§- 2.3.1. Представление в форме эквивалентных схемУчебные элементы параграфа:
- Эквивалентная схема (ЭС) модели.
- Методика составления ЭС
Структуру формальной математической модели на макроуровне можно представлять на разных уровнях абстракции. Одной из них являются эквивалентные схемы, которые состоят из набора базовых элементов и связей между ними. Методика построения эквивалентных схем содержит следующие шаги:
- Выделить элементы, массу которых надо учесть и изобразить их условным изображением двухполюсника. Один полюс соединить с базовым узлом, определяющим инерционную систему отсчета. Второй будет соединяться с другими элементами.
- Выделить элементы трения и упругости. Один полюс элементов трения подсоединить к базовому узлу.
- Соединить элементы массы с элементами трения, а элементы упругости между массами.
- Выделить источники, прикладываемые к пассивным элементам. Источник силы (потока) соединяется между базовым узлом и массой, на которую он воздействует.
Рассмотрим пример составления эквивалентной схемы для системы, состящей из элементов одной физической природы — техническойСистемы механического типа, представленной на рис. 2.9а.Э то грузовик массойm1, который тянет два прицепа с массойm2,m3. а)
то грузовик массойm1, который тянет два прицепа с массойm2,m3. а) 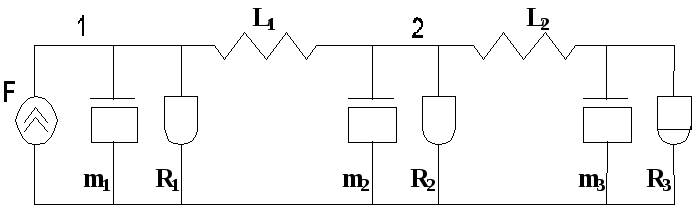 б)Рис. 2.9. Механическая поступательная система (а) и ее эквивалентная схема (б) Эквивалентная схема для сил и скоростей вдоль горизонтальной оси представлена на рис. 2.9.б.Сила инерции массы автомобиля, прицепа 1 и прицепа 2, которая преодолевается силой тяги F, противостоят силы сопротивления (трение об поверхность движения) R1, R2, R3. Упругие связи между тягачом и прицепами представляются элементами L1 и L2.Если по эквивалентной схеме составить топологические уравнения, то получится система дифференционных уравнений. Это формальная математическая модель.Для систем, в которые входят подсистемы разнообразной природы эквивалентные схемы создаются для каждой из них с учетом вида связи.Пример такой системы и ее эквивалентная схема представленны на рис. 2.7.Cистема состоит из гидравлической подсистемы — трубопровод, заполненный жидкостью и механической подсистемы — цилиндр с поршнем.Гидравлическая подсистема (p) представляется тремя пассивными элементами: C1— емкость трубопровода; L1– индуктивность (упругость среды); R1– сопротивление трения по длине трубопровода; и двумя активными: Р — источник давления (потенциальный); М — источник расхода (поток).Механическая подсистема (q) состоит из следующих базовых элементов: m1— масса поршня; m2— масса штока; R2— трение поршня о стенки цилиндра; R3— трение штока об уплотнение; UP1— упругая связь между поршнем и штоком; F1— (источник) сила, которая воздействует на поршень через шток. F2 —сила, воздействующая на поршень со стороны жидкости.
б)Рис. 2.9. Механическая поступательная система (а) и ее эквивалентная схема (б) Эквивалентная схема для сил и скоростей вдоль горизонтальной оси представлена на рис. 2.9.б.Сила инерции массы автомобиля, прицепа 1 и прицепа 2, которая преодолевается силой тяги F, противостоят силы сопротивления (трение об поверхность движения) R1, R2, R3. Упругие связи между тягачом и прицепами представляются элементами L1 и L2.Если по эквивалентной схеме составить топологические уравнения, то получится система дифференционных уравнений. Это формальная математическая модель.Для систем, в которые входят подсистемы разнообразной природы эквивалентные схемы создаются для каждой из них с учетом вида связи.Пример такой системы и ее эквивалентная схема представленны на рис. 2.7.Cистема состоит из гидравлической подсистемы — трубопровод, заполненный жидкостью и механической подсистемы — цилиндр с поршнем.Гидравлическая подсистема (p) представляется тремя пассивными элементами: C1— емкость трубопровода; L1– индуктивность (упругость среды); R1– сопротивление трения по длине трубопровода; и двумя активными: Р — источник давления (потенциальный); М — источник расхода (поток).Механическая подсистема (q) состоит из следующих базовых элементов: m1— масса поршня; m2— масса штока; R2— трение поршня о стенки цилиндра; R3— трение штока об уплотнение; UP1— упругая связь между поршнем и штоком; F1— (источник) сила, которая воздействует на поршень через шток. F2 —сила, воздействующая на поршень со стороны жидкости. а)
а) б)Рис. 2.10. Гидро-механическая система (а),
б)Рис. 2.10. Гидро-механическая система (а),
Источник